July 19, 2022, JST
同期モータ駆動用センサレスモータドライバを試作
T. Hayashi,
A. Nakamura,
H. Kurumatani
keywords:
モータドライブ
,
ベクトル制御
開発背景
高機能なロボティクスの実現を目的として,モータドライブシステムの開発をしています。私たちは人間の運動制御 (Motor control) および身体制御の階層的制御構造の観点[1-3]から,高機能性が「柔軟な思考や学習・経験知に基づく動作決定」と「精密かつ柔軟な身体制御」によって獲得されると考えています。モータドライブシステムは身体制御の基礎性能を決定するものであり,実現可能な動作の幅を決定するものとなります。
以上の思想より,モータドライブシステムを開発する副次的な目的は「高性能なモーションコントロール」を実現することにあります。モーションコントロールとは機械の位置・速度・加速度および機械による作用力を制御することを目的とした技術です。本稿で言及するモーションコントロールの性能とは指令値追従および外乱抑圧に関する能力とし,システムの制御帯域を指標として判定されるものとします。モーションコントロール系はモータ・ドライバ・センサ・コントローラ等によって構成され,その性能は各システムの性能に依存して決定します。このシステムの性能について,S. D. Eppinger は性能上限が各システムの持つ不確かさや信号の伝達遅れによって制限されることを示しています[4, 5]。概要については資料室の記事をご参照ください。ここで問題となる信号の伝達遅れとしては,モータ駆動のための電力生成,機械運動の物理的伝達,センサの物理量-電気量変換等の遅れが挙げられます。この課題解決の一環として,私たちは駆動系の高速化に焦点を当てています。
以上の思想より,モータドライブシステムを開発する副次的な目的は「高性能なモーションコントロール」を実現することにあります。モーションコントロールとは機械の位置・速度・加速度および機械による作用力を制御することを目的とした技術です。本稿で言及するモーションコントロールの性能とは指令値追従および外乱抑圧に関する能力とし,システムの制御帯域を指標として判定されるものとします。モーションコントロール系はモータ・ドライバ・センサ・コントローラ等によって構成され,その性能は各システムの性能に依存して決定します。このシステムの性能について,S. D. Eppinger は性能上限が各システムの持つ不確かさや信号の伝達遅れによって制限されることを示しています[4, 5]。概要については資料室の記事をご参照ください。ここで問題となる信号の伝達遅れとしては,モータ駆動のための電力生成,機械運動の物理的伝達,センサの物理量-電気量変換等の遅れが挙げられます。この課題解決の一環として,私たちは駆動系の高速化に焦点を当てています。
試作ボードの概要
本試作では無人航空機 (Unmanned Air Vehicle: UAV) の駆動を目的として,磁極位置センサレス方式の同期モータドライブシステムを設計しました。本システムはベクトル制御器と磁極位置推定器を搭載しており,磁極位置推定には磁束オブザーバを使用しています。センサを設置する必要がなく機体の軽量化が可能なために制御性能を向上しやすく,また安価にシステムを構築することができます。
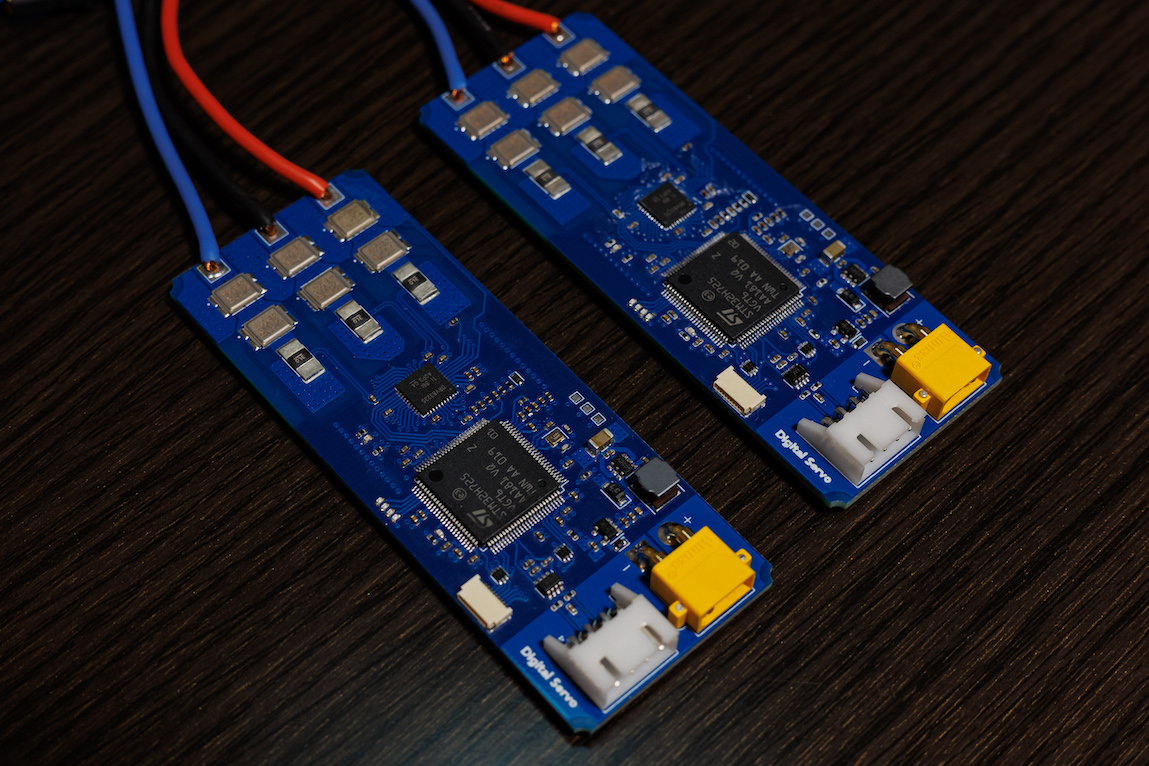
| specification | |
| MCU | Arm Cortex-M7 MCU @ 550MHz |
| 寸法 | 70 x 30 mm |
| 重量 | 15.2 g |
| 入力電圧 | 22 V |
| 出力電流 | 20 A |
| 駆動系制御方式 | ベクトル制御 |
| ファームウェア | 独自方式 |
| 通信プロトコル | UAVCAN |
基板サイズは ,重量は であり,中型のUAVに搭載することができます。ベクトル制御の制御帯域は まで設定することが可能です。ベクトル制御系の上位系に速度制御系を構築することで,本システムをESC (Electric Speed Controller) として使用することができます。以下にベクトル制御系の帯域を と設定した場合のベクトル制御応答,および速度制御系の帯域を と設定した場合の速度制御応答を示します。
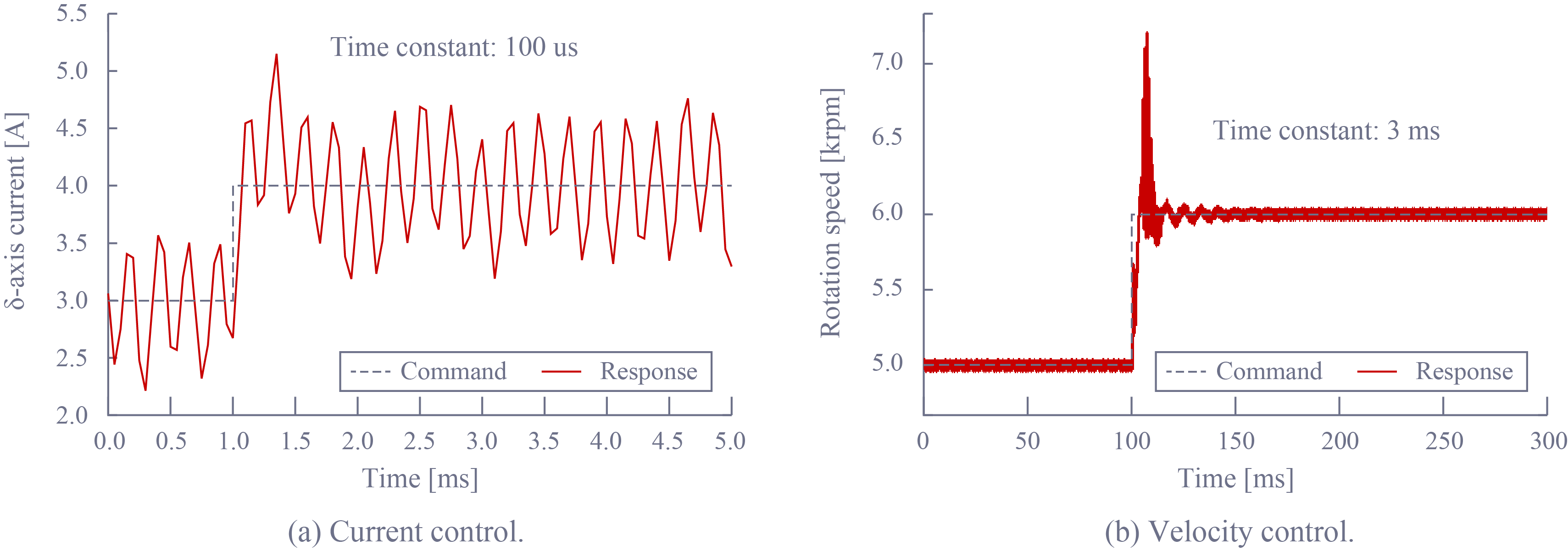
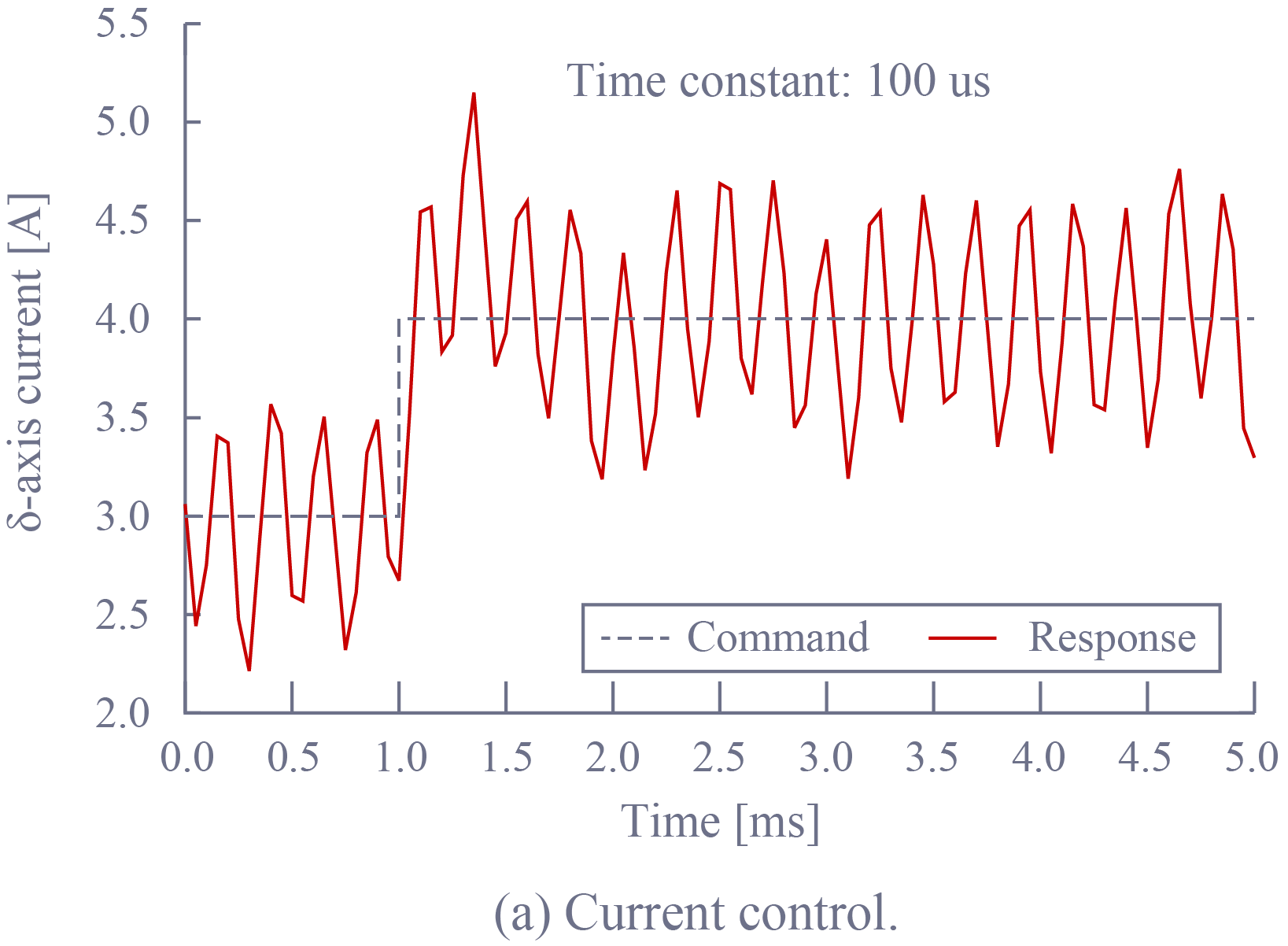
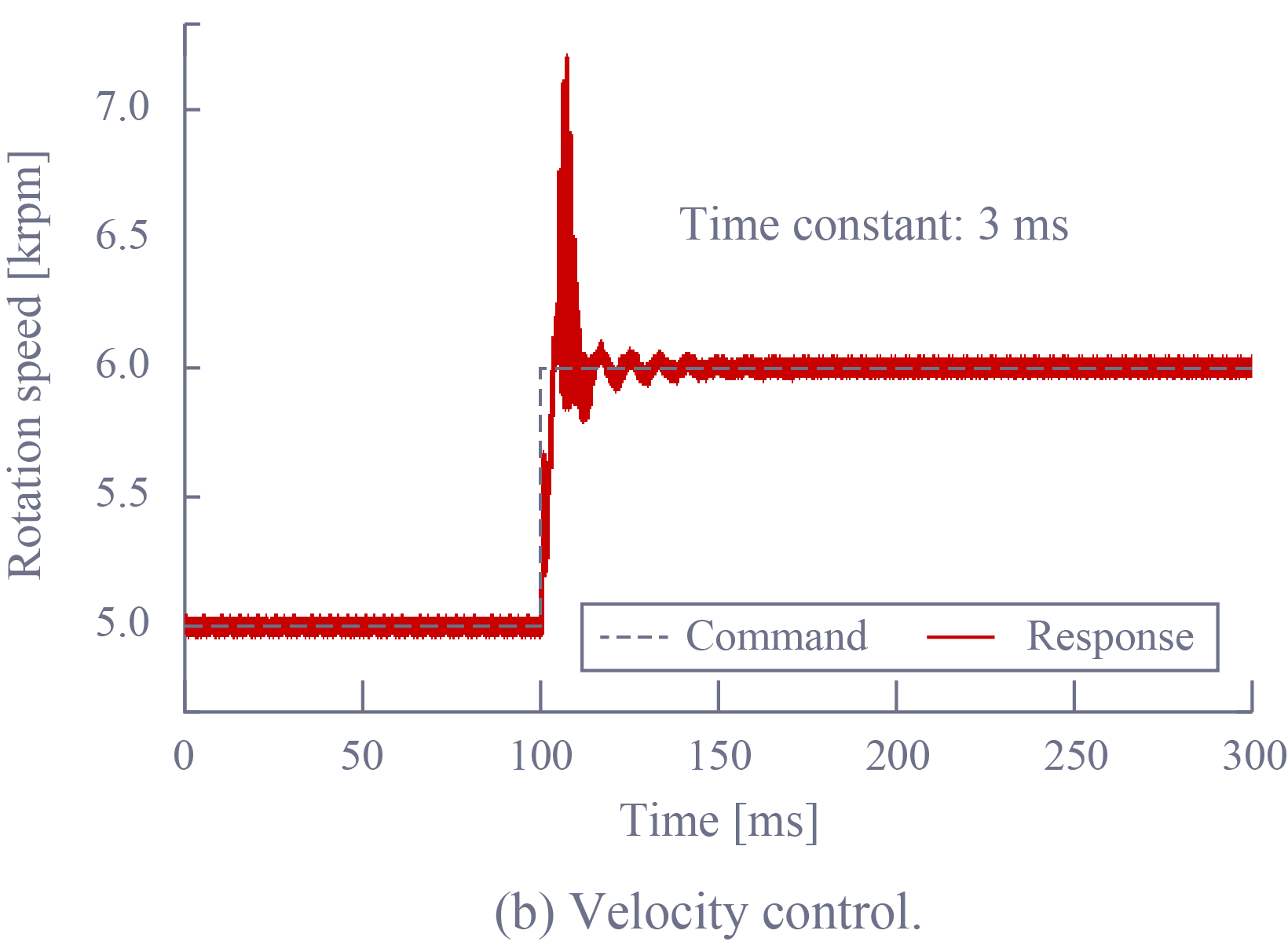
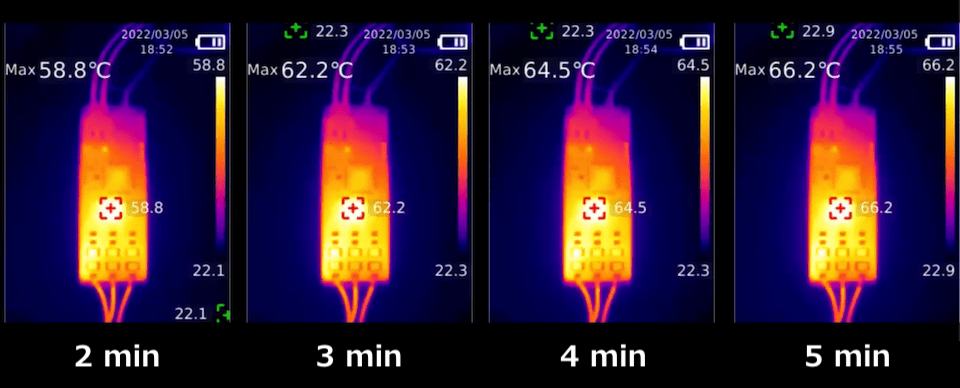
各制御の時定数は および となり,高い応答性を示すことが確認できました。また,電流 を5分間連続で印加した際のボードの温度遷移は次のようになりました。測定結果に示される温度値は,最も発熱したパワー半導体用のゲートドライブICの温度です。
本システムを採用することで制御ループ内の伝達遅れを低減することができるため,制御システムの性能向上が期待できます。本システムを使用したUAVの制御性能の向上については,日本電気学会主催の国際学会IEEJ SAMCON 2022にて報告いたしました。
参考文献
[1]S. J. Thorpe and M. Fabre-Thorpe, "Seeking Categories in the Brain," in Science, vol. 291, no. 5502, Jan. 2001.
[2]D. Rosenbaum, "Human motor control," in Academic Press., 2009.
[3]J. Rasmussen, "Skills, rules, and knowledge; signals, signs, and symbols, and other distinctions in human performance models," in IEEE Transactions on Systems, Man, and Cybernetics, vol. SMC-13, no. 3, pp. 257-266, May 1983.
[4]S. D. Eppinger and W. P. Seering, "Understanding bandwidth limitations in robot force control," in Proceedings. 1987 IEEE International Conference on Robotics and Automation, pp. 904-909, 1987.
[5]S. D. Eppinger and W. P. Seering, "Three dynamic problems in robot force control," in IEEE Transactions on Robotics and Automation, vol. 8, no. 6, pp. 751-758, Dec. 1992.