Outstanding Paper Award
IEEJ SAMCON 2022
Robust Attitude Control of Quad-Rotor UAV
Using Field Oriented Control
Motivation
Our motivation is to provide versatility and dexterity to an unmanned aerial vehicle (UAV). They are used in harsh environments that are difficult to explore and hence are required to perform an agile motion and be robust against disturbance. Since many tasks in a danger zone are still performed by human operators, a UAV should have more intelligence and dexterity for handling such works. We worked on improving a control performance with believing it develops new applications.
How to improve a control performance is a complex problem. It requires us to refine a machine, control system, sensor system, and so on. If a machine is easy to deform and excite a self-oscillation, its control is difficult and such a vibration causes a sensor error. If a control system is slow, command tracking and disturbance rejection also become slow, and a system cannot perform an agile motion. If a sensor system includes a delay, it dissociates a voluntary operation and UAV motion, and a stabilizing operation sometimes leads to a pilot-induced oscillation. Thus, we should identify a bottleneck problem overlooking an entire system. In this work, we found that a bottleneck is the slowness of a thrust generation by propellers, which limits the drive performance of a UAV.
Approach
In classical control theory, a delay in a feedback system is known as troublesome that degrades stability and control performance. A delay exists in most the systems and how to deal with it determines a control performance. Here, analyzing the motor control system of a human provides a hint for system design. Let us introduce a system including a receptor, central nervous system, and effector.
Human actions are roughly classified into 3 hierarchies:
1. Deliberative motion via a cerebrum
2. Coordinating motion via a cerebellum
3. Reflex motion through a spinal cord
Each layers has unique responsiveness and functionality, and these generate complementary motions.
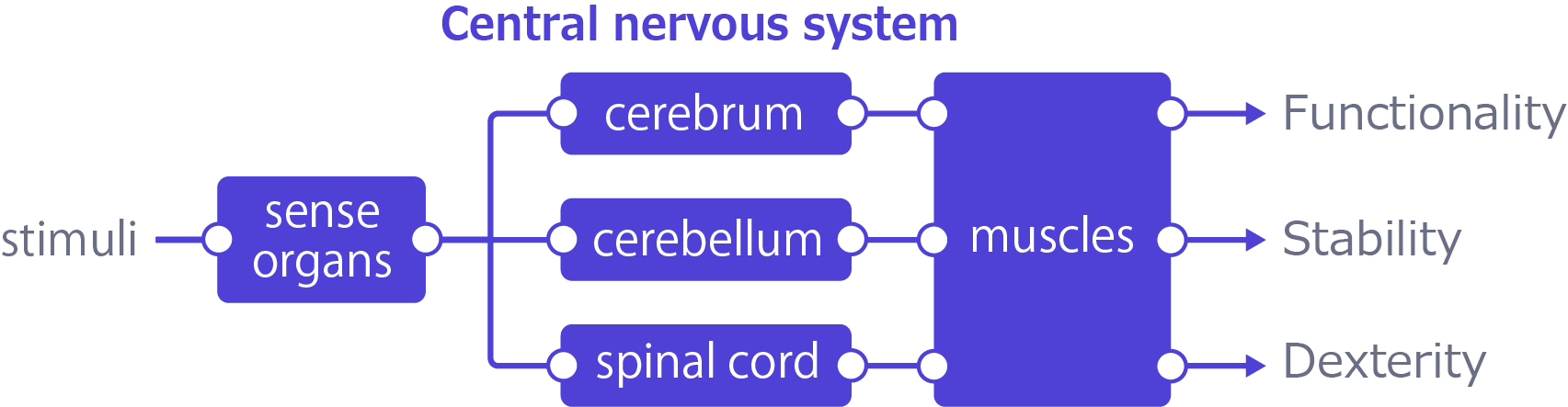
The diagram indicates that a hierarchical multirate design is good for securing both versatility and dexterity. Here, we can see that the foundation of a practicable motion is supported by the reflex center and effector control system. In other words, stability and control performance are guaranteed by the responsive systems. This time, we designed the lower-layer systems from motor torque generation to thrust control and intended to realize robust attitude control.
The Core of Responsiveness
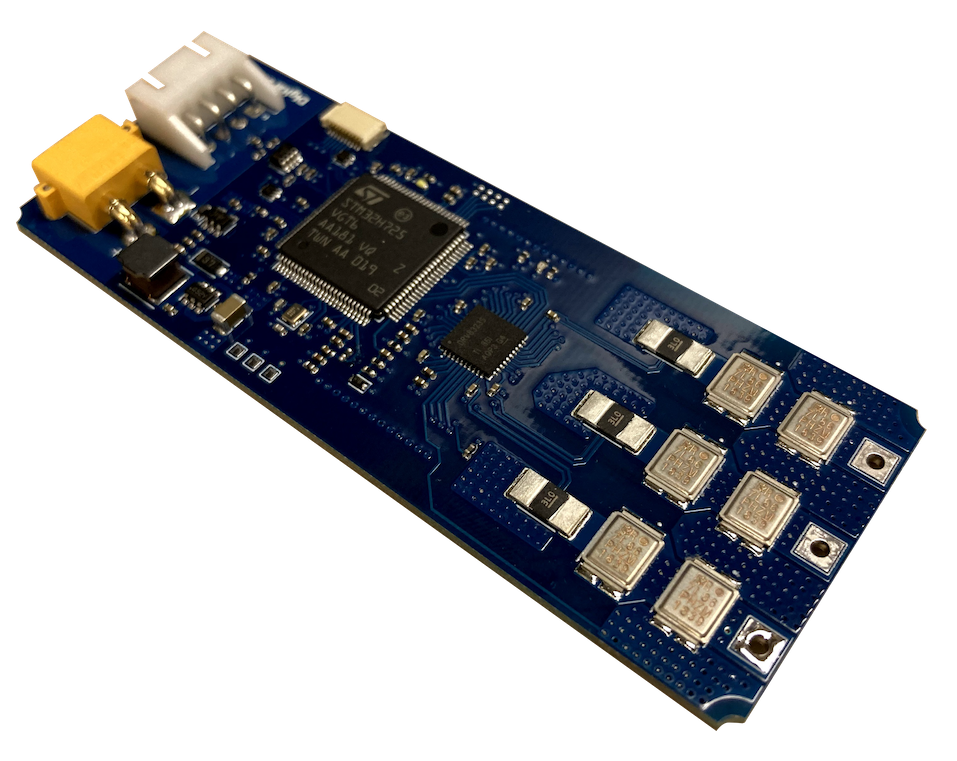
Compact Motor Driver
The agility of a robot depends on the drive performance of an actuator. This board enables responsive torque control and motion control.
1. Field-Oriented Control
Measured by an onboard ADC
The board specializes in wideband field-oriented control (FOC) that relates to the generation of motor torque. A current in the reference frame of a rotor flux was controlled with a control bandwidth of up to 10 krad/s. The system enables responsive torque generation and realizes an agile motion.
2. Angular Velocity Control
Estimated using a flux-observer
Wideband torque control enables a motor to perform a responsive motion. Expecting to install this board on a UAV, the board includes an angular velocity controller that regulates a rotation speed of a propeller. We validated an angular velocity was controlled with a control bandwidth of 300 rad/s.
3. Thrust Control
Measured by DynPick WGF-3M50-5-RG5
Thrust control is indirectly achieved using angular velocity control. When our controller changed a rotation speed of a propeller from 4000 rpm to 5000 rpm, a thrust response showed a time constant of 8.9 ms. Compared with a classical board using a six-step commutation, the delay time was reduced by almost 88.9 %.
Highly Stable Flight
Fast thrust control enables a UAV to perform a responsive motion. The UAV tracked the commands well even in a transition state, and errors were quickly suppressed under the influence of disturbance.
We are looking for partners to pilot this UAV. Please contact us if you are interested. We would be glad if you join us.
Hardware setup
| part | vendor | product |
| Motor | T-MOTOR | MN2212 KV920-V2.0 |
| Propeller | T-MOTOR | T9545-B |
| Battery | Hyperion HK Ltd. | HP-G550-3300S6 |
| IMU sensor | TDK Corp. | ICM-20602 |
| Geomagnetic sensor | STMicroelectronics | IIS2MDC |
Verification system
| part | vendor | product |
| Current probe | Tektronix, Inc. | A622 |
| Force sensor | WACOH-TECH Inc. | DynPick WGF-3M50-5-RG5 |
| Torque sensor | Unipulse Corp. | UTM II-2Nm |
Technical Notes
Disturbance Observer
This observer is used to estimate and suppress a disturbance that impedes a rotational motion of a UAV.
No Link