線形制御系設計
線形システムの表現
線形システムの特性解析
制御器設計
観測器設計
モーションコントロール
加速度制御
剛体の姿勢制御
モータドライブ
駆動制御法
磁極位置推定法
システム同定
ホワイトボックスモデル
基本的な制御系構成
制御器はシステムを所望の状態とすることを目的として設計され、操作量を調整することで状態を目標軌道に沿って遷移させる、また軌道から外れた場合には修正する作用を持つ。この作用はそれぞれ指令値追従特性および外乱抑圧特性として指標化され、制御器設計では上記の特性が性能要件を満たすことを目指す。ここでは基本的な制御系の構造とその特徴を確認し、上記の二特性を設計可能な二自由度制御について述べる。
問題設定
システム に対して、制御入力 により出力 を目標軌道 に追従させることを考える。ここではシステムが外生入力として制御入力 と外乱 を持ち、出力 が測定可能であるとする。
制御器の生成する入力参照値を 、出力測定値を とし、入力に際しては参照値にプロセス雑音 が重畳し、測定には観測雑音 が伴うものとする。
このシステムをブロック線図を用いて表現した場合、以下のようになる。
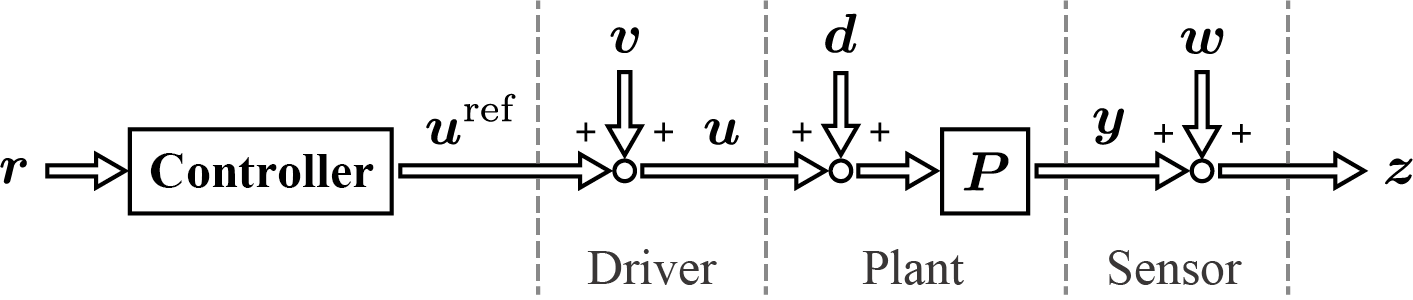
制御設計問題は出力誤差 を抑制する制御器を発見することとなる。
フィードバック制御
フィードバック制御は出力誤差を抑圧する働きを持ち、外乱等による出力誤差を補正するために使用される。ここでは制御対象 に対してフィードバック制御器 を設置することを考える。このとき、ブロック線図は以下のように表される。
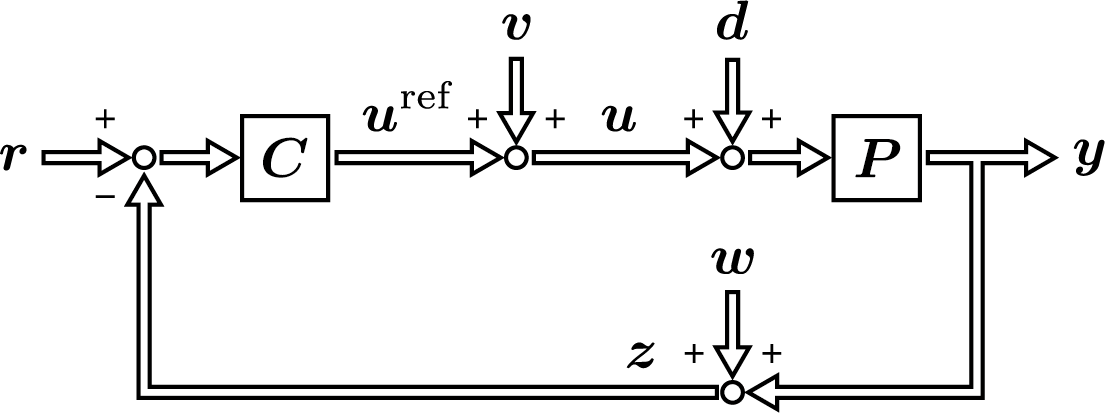
この制御則を適用したシステムにの出力は次のようになる。
ただし、 はそれぞれ指令値、外乱、プロセス雑音および観測雑音から出力までの伝達特性を表し、以下のように定義されるものとする。
指令値追従と外乱抑圧を達成する条件は かつ となる。これを実現するためには のゲインを高く設定する必要があるが、これは観測雑音および系に含まれる位相遅れの影響により実現することはできない。また、 と は共通の特性多項式、つまり等しい極零点配置を持つため指令値追従特性および外乱抑圧特性の設計を独立に設計することができない。定常状態における完全な指令値追従および外乱抑圧を実現する制御器の要件は内部モデル原理により規定されるが、上記の制御系構成では要件を満たす最小の制御器を設置できないことを示している。この制御系はどちらか一方の特性を設計可能であるため、一自由度制御系と呼ばれる。
フィードフォワード制御
フィードフォワード制御は制御対象の特性が既知である際に指令値追従を実現するために使用される。プラント に対するモデル を用いて以下に示すブロック線図のように制御器を設計する。

ただし、 は指令値平滑器を表す。プラント が厳密にプロパーである場合、プラントモデルの逆システム は非プロパーとなるため直接実装することができない。そこで、平滑器を含めたシステム がプロパーとなるように を設計することで上記のシステムを実装することができる。この制御系の出力は次のように表される。
プラントモデルが実プラントと一致すると仮定した場合のノミナル性能について、指令値追従特性は によって決定する。一方で、出力誤差を補正する機能はなく、モデル化誤差および外乱の影響はそのまま出力に現れる。そのため単体で使用されることは少なく、フィードバック制御系の指令値追従特性を向上する目的で併設される。
二自由度制御器
フィードバック制御系にフィードフォワード制御系を併設することにより、指令値追従特性と外乱抑圧特性が独立に設計可能となる。二種類の制御器が併設された次のブロック線図について考える。
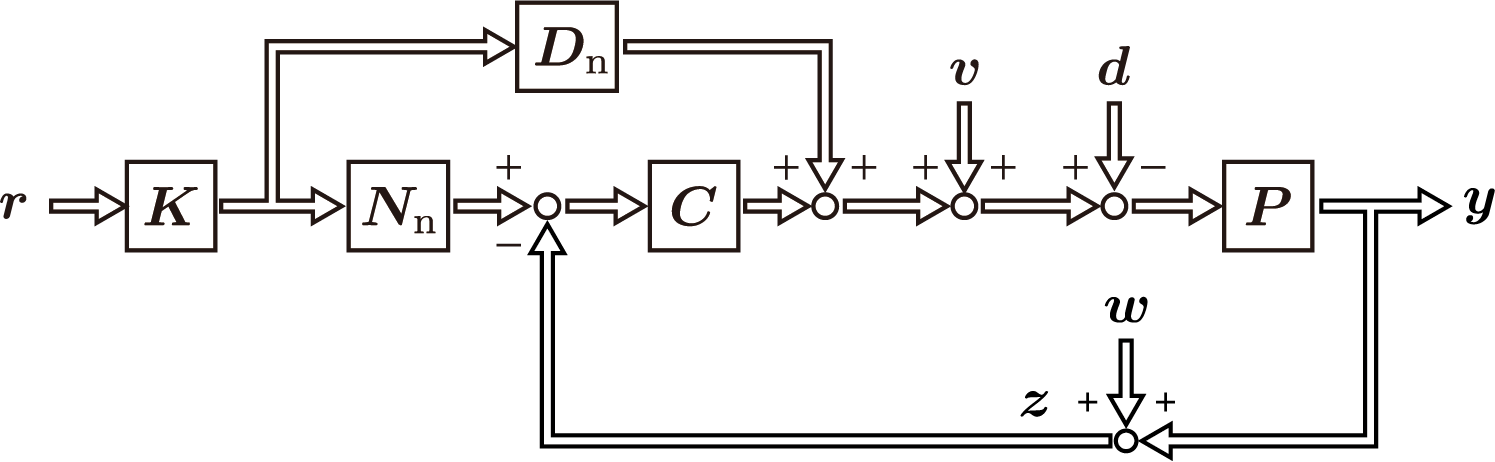
ただし、 はプラントモデルの右既約分解表現 に現れる多項式とする。フィードフォワード制御系によるノミナル出力は となり、フィードバック制御系はモデル化誤差や外乱によって出力誤差が発生した際に機能する。この制御系の出力は次のように表される。
右辺第一項はフィードフォワード制御器、第二項以降はフィードバック制御器による作用を表す。フィードフォワード制御系は指令値追従を達成する役割、フィードバック制御系はモデル化誤差や外乱による出力誤差を補正する役割を持ち、相補的な働きによって出力誤差を抑制する。フィードバック制御器 の設計では指令値追従特性を考慮する必要がなく、一自由度制御系に見られた極零点配置問題が解消されている。上記の制御系は指令値追従特性と外乱抑圧特性を独立に設計可能であることから、二自由度制御系と呼ばれる。ただし、 の設計に関してはモデル化誤差,観測雑音および位相遅れによる制約が残されており、外乱抑圧特性の設計が完全に独立とはならないことに留意する。
CONTENTS
© DigitalServo