April 3, 2026, JST
MTL uDDモータを使用した高速位置決めを実施しました
H. Kurumatani,
A. Nakamura
keywords:
モーションコントロール
,
高速位置決め
私たちが設計する医薬品製造装置では,マイクロテック・ラボラトリー株式会社 (Microtech Laboratory Inc.; MTL) が製造する小型ダイレクトドライブモータ: μDDシリーズを採用しています。こちらの製品を採用する理由として,以下の特徴を重視しています。
-
トルク密度が高くダイレクトドライブが可能,かつ高精度の角度エンコーダを搭載して小型化されている
本モータは高精度なエンコーダが搭載されているにも関わらず非常に小型であり,設置性が非常に良いため動力伝達機構の設計を非常に簡素化することができます。また,μDDシリーズではトルク出力特性に応じた幅広い製品が提供されているため,従来では減速機付きモータで駆動していた箇所をμDDモータに換装することも可能であり,空間制約を大きく緩和しました。 -
モータの磁気特性および機械特性が優れており,制御性が非常に良い
電機子電流に対する出力トルクの比例特性が広い周波数帯域で確保されており,モーションコントロールにおいて問題となるモデル変動の影響が非常に小さいことを確認しています。また,回転軸精度が非常に高く保たれており,様々な運転条件において安定した角度値の取得が可能です (FAQ:「回転軸精度はどのくらいでしょうか?」)。これらの要因により外乱の少ない条件下でのモータ駆動,およびエンコーダ値の微分信号を精度良く計算できることから,制御周波数帯域を広く確保することが可能となります。これらは高速動作や精密位置決め,精密押当て制御の実現に必要不可欠な要件と考えています。
弊社は制御技術によって装置の付加価値を高めることを目標としており,μDDモータはこの目的に非常に合致した製品となっていました。
高速位置決め試験
弊社モータドライバを使用してμDDモータ: MDH-6018-20Bの位置決め試験を行いました。
試験内容を以下に記載します。
- 幅 のステップ信号を位置参照値としたステップ試験
- 制御方式: 位置レギュレータ (フィードバック制御のみ,フィードフォワードなしの1自由度系構成)
- サンプリング周波数:
- エンコーダ分解能:
上記のステップ幅は,モータドライバの出力が飽和しない範囲で決定しています。
本試験の応答結果を以下に示します。
左図は過渡応答,右図は定常状態における角度誤差を表示しています。
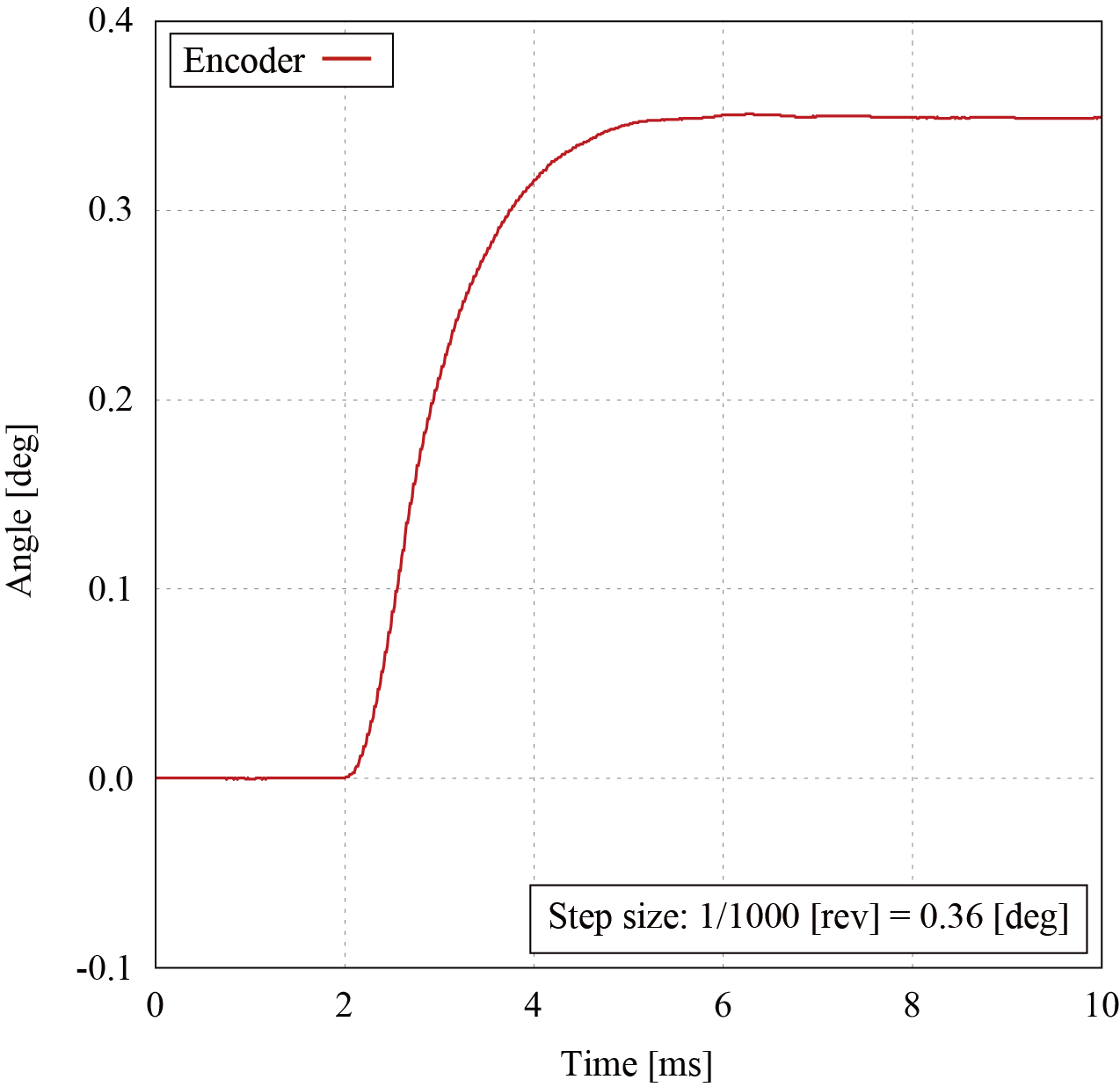
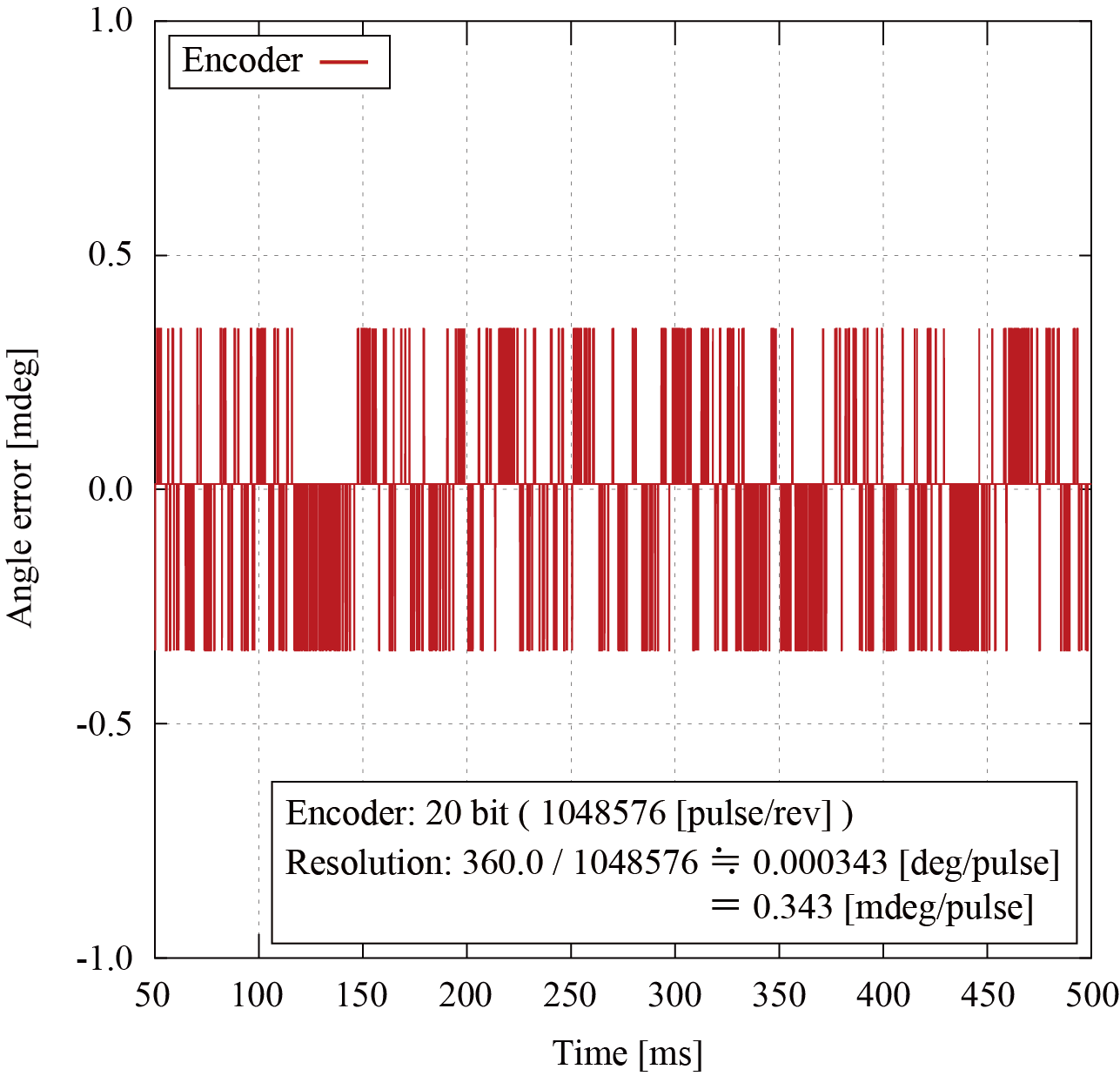
本試験条件においてはモータ角度は 程度で静定しました。また,定常状態においては誤差 パルスに収まることが確認されました
(エンコーダ分解能の制約により,角度応答の離散値が位置参照値を誤差なく表現することができないため,定常的に誤差が生じています)。
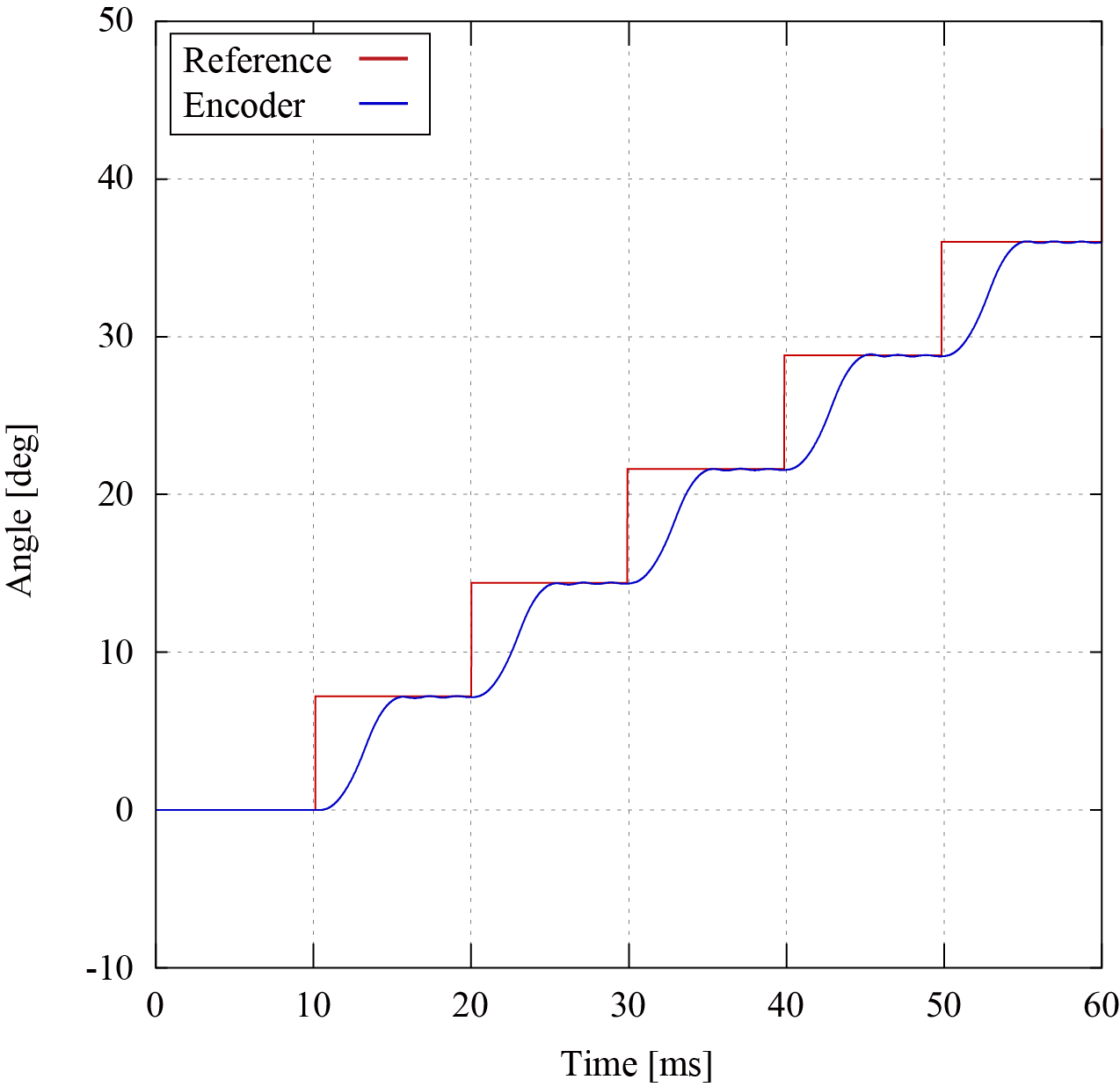
繰り返し位置決め試験
前述の構成を用いて, 毎に位置参照値を ずつステップ状に増加させた場合の応答を以下に示します。動画は のハイスピードカメラで撮影した 倍スローモーション動画となります。各試行においてモータは 以内に所定の角度に到達しており,高速な間欠動作が達成されていることが確認できました。